🔗 Navigation
🔗 Navigation
- Home
- Requirements Specification
- Concept of Operations
- High Level Design
- Software Subsystem: Navigation and FSM
- Software Subsystem: ArUco Marker Detection
- Mechanical Subsystem
- Electrical Subsystem
- Interface Control Document
- Software and Firmware Development
- Testing Documentation
- User Manual
- Areas for Improvement
- Appendix
Appendix
A. RViz Full Configuration Payload
This section preserves the full RViz payload so teams can copy the exact configuration if needed.
Use it with:
cp ~/turtlebot3_ws/src/turtlebot3/turtlebot3_cartographer/rviz/tb3_cartographer.rviz ~/tb3_cartographer.rviz.backup
nano ~/turtlebot3_ws/src/turtlebot3/turtlebot3_cartographer/rviz/tb3_cartographer.rviz
Paste the payload below into tb3_cartographer.rviz:
Panels:
- Class: rviz_common/Displays
Help Height: 78
Name: Displays
Property Tree Widget:
Expanded:
- /Global Options1
- /LaserScan1/Topic1
Splitter Ratio: 0.3916349709033966
Tree Height: 347
- Class: rviz_common/Selection
Name: Selection
- Class: rviz_common/Tool Properties
Expanded:
- /Publish Point1
- /2D Pose Estimate1
Name: Tool Properties
Splitter Ratio: 0.5886790156364441
- Class: rviz_common/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 1
Class: rviz_default_plugins/Grid
Color: 160; 160; 164
Enabled: true
Line Style:
Line Width: 0.029999999329447746
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XY
Plane Cell Count: 10
Reference Frame: <Fixed Frame>
Value: true
- Class: rviz_default_plugins/TF
Enabled: true
Frame Timeout: 15
Frames:
All Enabled: false
base_footprint:
Value: false
base_link:
Value: true
base_scan:
Value: false
caster_back_link:
Value: false
imu_link:
Value: false
map:
Value: false
odom:
Value: false
wheel_left_link:
Value: false
wheel_right_link:
Value: false
Marker Scale: 1
Name: TF
Show Arrows: true
Show Axes: true
Show Names: true
Tree:
map:
odom:
base_footprint:
base_link:
base_scan:
{}
caster_back_link:
{}
imu_link:
{}
wheel_left_link:
{}
wheel_right_link:
{}
Update Interval: 0
Value: true
- Alpha: 1
Autocompute Intensity Bounds: true
Autocompute Value Bounds:
Max Value: 10
Min Value: -10
Value: true
Axis: Z
Channel Name: intensity
Class: rviz_default_plugins/LaserScan
Color: 255; 255; 255
Color Transformer: Intensity
Decay Time: 0
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
Max Intensity: 4439
Min Color: 0; 0; 0
Min Intensity: 105
Name: LaserScan
Position Transformer: XYZ
Selectable: true
Size (Pixels): 3
Size (m): 0.019999999552965164
Style: Boxes
Topic:
Depth: 50
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Best Effort
Value: /scan
Use Fixed Frame: true
Use rainbow: true
Value: true
- Angle Tolerance: 0.10000000149011612
Class: rviz_default_plugins/Odometry
Covariance:
Orientation:
Alpha: 0.5
Color: 255; 255; 127
Color Style: Unique
Frame: Local
Offset: 1
Scale: 1
Value: true
Position:
Alpha: 0.30000001192092896
Color: 204; 51; 204
Scale: 1
Value: true
Value: false
Enabled: false
Keep: 100
Name: Odometry
Position Tolerance: 0.10000000149011612
Shape:
Alpha: 1
Axes Length: 1
Axes Radius: 0.10000000149011612
Color: 255; 25; 0
Head Length: 0.30000001192092896
Head Radius: 0.10000000149011612
Shaft Length: 1
Shaft Radius: 0.05000000074505806
Value: Arrow
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /odom
Value: false
- Alpha: 0.699999988079071
Class: rviz_default_plugins/Map
Color Scheme: map
Draw Behind: false
Enabled: true
Name: Map
Topic:
Depth: 5
Durability Policy: Transient Local
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /map
Update Topic:
Depth: 5
Durability Policy: Transient Local
History Policy: Keep Last
Reliability Policy: Reliable
Value: /map_updates
Use Timestamp: false
Value: true
- Class: rviz_common/Group
Displays:
- Class: rviz_common/Group
Displays:
- Alpha: 0.699999988079071
Class: rviz_default_plugins/Map
Color Scheme: costmap
Draw Behind: true
Enabled: true
Name: Map
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /global_costmap/costmap
Update Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /global_costmap/costmap_updates
Use Timestamp: false
Value: true
- Alpha: 1
Buffer Length: 1
Class: rviz_default_plugins/Path
Color: 255; 0; 0
Enabled: true
Head Diameter: 0.30000001192092896
Head Length: 0.20000000298023224
Length: 0.30000001192092896
Line Style: Lines
Line Width: 0.029999999329447746
Name: Path
Offset:
X: 0
Y: 0
Z: 0
Pose Color: 255; 85; 255
Pose Style: None
Radius: 0.029999999329447746
Shaft Diameter: 0.10000000149011612
Shaft Length: 0.10000000149011612
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /global_plan
Value: true
Enabled: true
Name: Global Map
- Class: rviz_common/Group
Displays:
- Alpha: 1
Class: rviz_default_plugins/Polygon
Color: 25; 255; 0
Enabled: true
Name: Polygon
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /local_costmap/footprint
Value: true
- Alpha: 0.699999988079071
Class: rviz_default_plugins/Map
Color Scheme: costmap
Draw Behind: false
Enabled: true
Name: Map
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /local_costmap/costmap
Update Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /local_costmap/costmap_updates
Use Timestamp: false
Value: true
- Alpha: 1
Buffer Length: 1
Class: rviz_default_plugins/Path
Color: 255; 255; 0
Enabled: true
Head Diameter: 0.30000001192092896
Head Length: 0.20000000298023224
Length: 0.30000001192092896
Line Style: Lines
Line Width: 0.029999999329447746
Name: Path
Offset:
X: 0
Y: 0
Z: 0
Pose Color: 255; 85; 255
Pose Style: None
Radius: 0.029999999329447746
Shaft Diameter: 0.10000000149011612
Shaft Length: 0.10000000149011612
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /local_plan
Value: true
Enabled: true
Name: Local Map
- Alpha: 1
Arrow Length: 0.05000000074505806
Axes Length: 0.30000001192092896
Axes Radius: 0.009999999776482582
Class: rviz_default_plugins/PoseArray
Color: 0; 192; 0
Enabled: true
Head Length: 0.07000000029802322
Head Radius: 0.029999999329447746
Name: PoseArray
Shaft Length: 0.23000000417232513
Shaft Radius: 0.009999999776482582
Shape: Arrow (Flat)
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /particlecloud
Value: true
Enabled: false
Name: Navigation
- Class: rviz_common/Group
Displays:
- Alpha: 1
Autocompute Intensity Bounds: true
Autocompute Value Bounds:
Max Value: 0.18203988671302795
Min Value: 0.18195410072803497
Value: true
Axis: Z
Channel Name: intensity
Class: rviz_default_plugins/PointCloud2
Color: 0; 255; 0
Color Transformer: FlatColor
Decay Time: 0
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
Max Intensity: 4096
Min Color: 0; 0; 0
Min Intensity: 0
Name: scan_matched_points2
Position Transformer: XYZ
Selectable: true
Size (Pixels): 3
Size (m): 0.009999999776482582
Style: Boxes
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /scan_matched_points2
Use Fixed Frame: true
Use rainbow: true
Value: true
- Class: rviz_default_plugins/MarkerArray
Enabled: false
Name: Trajectories
Namespaces:
{}
Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /trajectory_node_list
Value: false
- Class: rviz_default_plugins/MarkerArray
Enabled: false
Name: Constraints
Namespaces:
{}
Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /constraint_list
Value: false
- Class: rviz_default_plugins/MarkerArray
Enabled: false
Name: Landmark Poses
Namespaces:
{}
Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /landmark_poses_list
Value: false
Enabled: true
Name: Cartographer
- Alpha: 1
Buffer Length: 1
Class: rviz_default_plugins/Path
Color: 0; 255; 255
Enabled: true
Head Diameter: 0.30000001192092896
Head Length: 0.20000000298023224
Length: 0.30000001192092896
Line Style: Lines
Line Width: 0.05000000074505806
Name: Exploration Path
Offset:
X: 0
Y: 0
Z: 0
Pose Color: 255; 85; 255
Pose Style: None
Radius: 0.029999999329447746
Shaft Diameter: 0.10000000149011612
Shaft Length: 0.10000000149011612
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /exploration_path
Value: true
Enabled: true
Global Options:
Background Color: 48; 48; 48
Fixed Frame: map
Frame Rate: 10
Name: root
Tools:
- Class: rviz_default_plugins/MoveCamera
- Class: rviz_default_plugins/Select
- Class: rviz_default_plugins/FocusCamera
- Class: rviz_default_plugins/Measure
Line color: 128; 128; 0
- Class: rviz_default_plugins/SetGoal
Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /move_base_simple/goal
- Class: rviz_default_plugins/PublishPoint
Single click: true
Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /clicked_point
- Class: rviz_default_plugins/SetInitialPose
Covariance x: 0.25
Covariance y: 0.25
Covariance yaw: 0.06853891909122467
Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: initialpose
Transformation:
Current:
Class: rviz_default_plugins/TF
Value: true
Views:
Current:
Angle: 0
Class: rviz_default_plugins/TopDownOrtho
Enable Stereo Rendering:
Stereo Eye Separation: 0.05999999865889549
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Invert Z Axis: false
Name: Current View
Near Clip Distance: 0.009999999776482582
Scale: 119.26066589355469
Target Frame: <Fixed Frame>
Value: TopDownOrtho (rviz_default_plugins)
X: 0.0023878198117017746
Y: -0.17037495970726013
Saved: ~
Window Geometry:
Displays:
collapsed: false
Height: 576
Hide Left Dock: false
Hide Right Dock: true
QMainWindow State: 000000ff00000000fd00000004000000000000017a000001e6fc0200000008fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000005c00fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073010000003d000001e6000000c900fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261000000010000010f00000236fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073000000003d00000236000000a400fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000004420000003efc0100000002fb0000000800540069006d00650100000000000004420000000000000000fb0000000800540069006d00650100000000000004500000000000000000000002db000001e600000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed: false
Tool Properties:
collapsed: false
Views:
collapsed: true
Width: 1115
X: 164
Y: 106
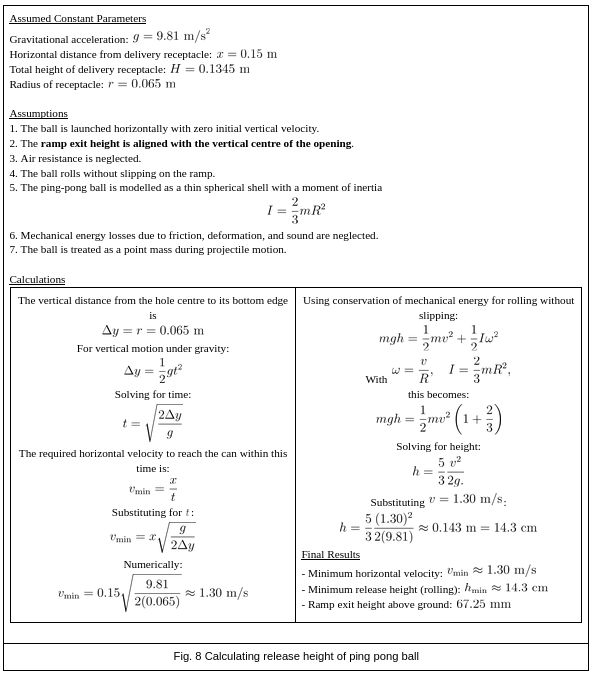
B. Calculated release height of ping pong ball